|
Minsen Yuan Hello! I am a third-year Ph.D. student in Aerospace Engineering and Mechanics at the University of Minnesota, Twin Cities, advised by Prof. Yue Yu and Prof. Ryan Caverly. I am the recipient of the John A. & Jane Dunning Copper Fellowship. Before joining UMN, I obtained my master's degree from the University of Michigan in 2023, and my bachelor's degree from Wuhan Institute of Technology in 2021. Email / CV / Google Scholar / LinkedIn |

|
ResearchMy research develops real-time trajectory optimization and optimal control methods for multi-agent autonomous systems, achieving orders-of-magnitude speedups over conventional approaches while maintaining rigorous constraint satisfaction. I focus on bridging optimization, estimation, and deployable autonomy, with a growing interest in learning-based methods. |
Trajectory Optimization for Energy-Sharing UAV-UGV with Multiple Task Locations |
|
|
Nonlinear Trajectory Optimization Models for Energy-Sharing
UAV-UGV Systems with Multiple Task Locations
Minsen Yuan, Amanuel Adane, James Humann, Yue Yu Under Review arXiv A nonlinear program (NLP) formulation for UAV-UGV trajectory optimization via smoothing of disjunctive constraints, supporting partial UAV recharge and reducing computation time by orders of magnitude over mixed-integer nonlinear (MINLP) formulations while maintaining comparable constraint satisfaction. |
Warm-Started Sequential Convex Programming (SCP) for Multi-Agent Trajectory Optimization |
|
|
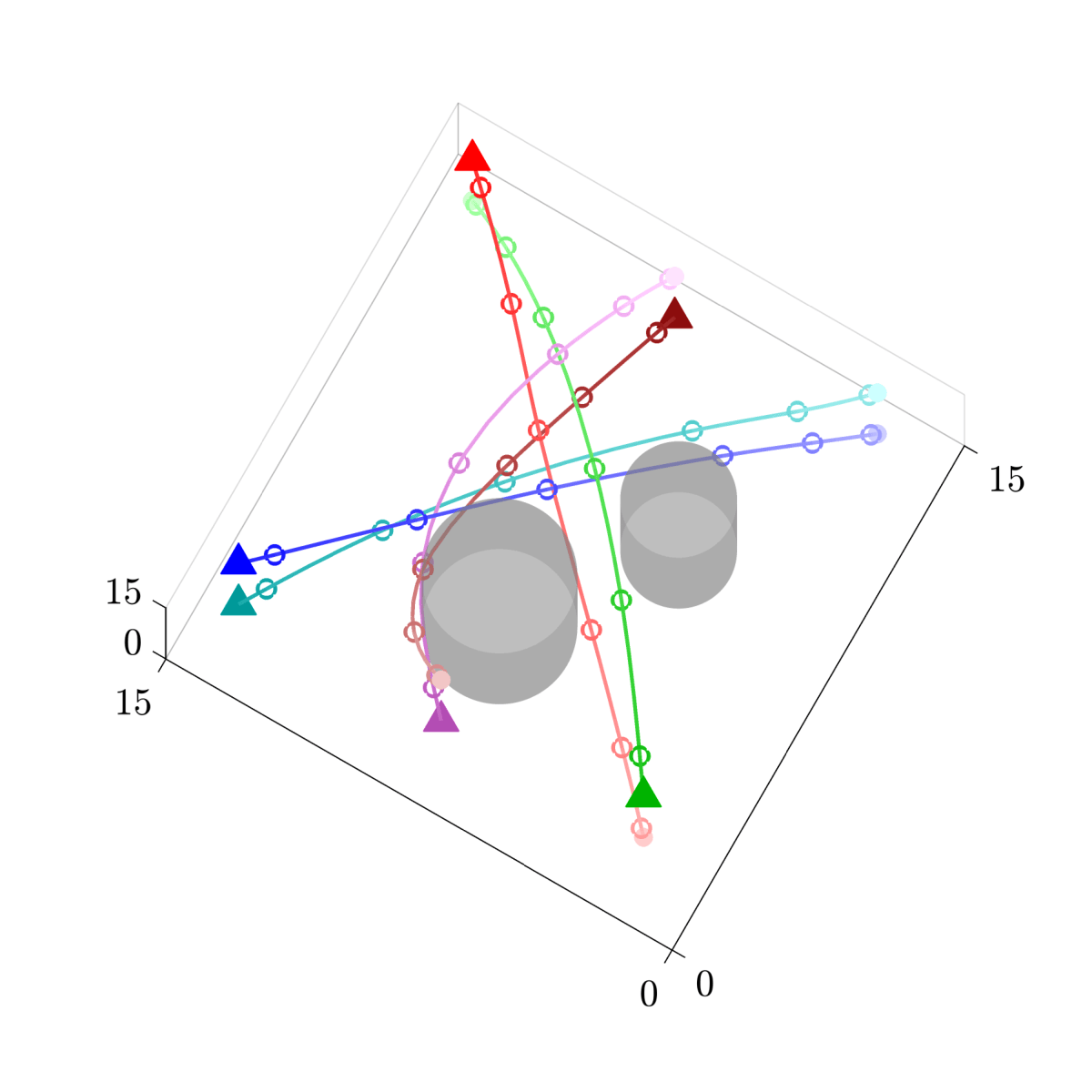
Sequential Convex Programming with Filtering-Based Warm-Starting
for Continuous-Time Multiagent Quadrotor Trajectory Optimization
Minsen Yuan, Yue Yu Journal of Guidance, Control, and Dynamics (JGCD) paper / arXiv A sequential convex programming framework with filtering-based warm-starting for continuous-time multiagent quadrotor trajectory optimization, ensuring constraint satisfaction along the entire trajectory and reducing computation time by up to two orders of magnitude over benchmark methods. |
|
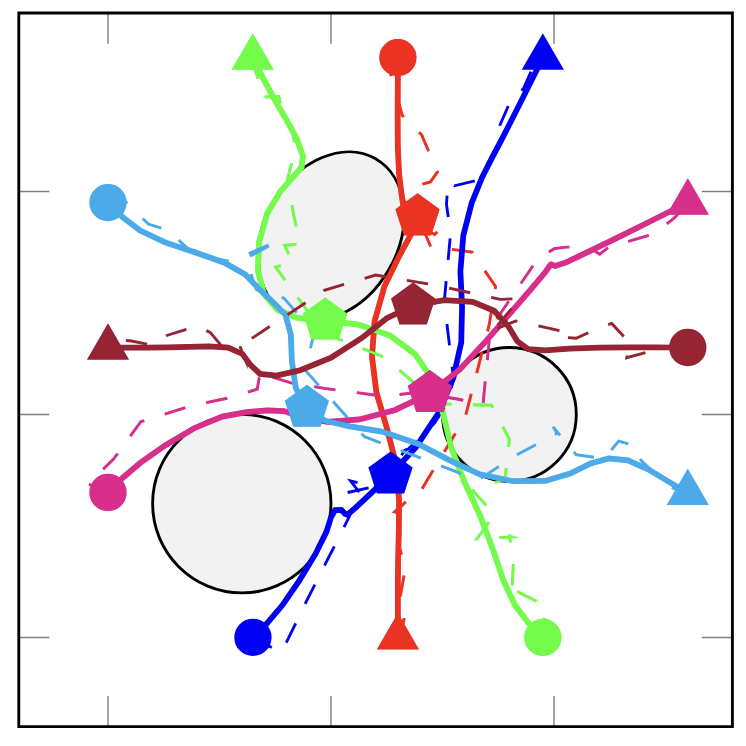
Filtering-Linearization: A First-Order Method for Nonconvex Trajectory Optimization with
Filter-Based Warm-Starting
Minsen Yuan, Ryan J. Caverly, Yue Yu American Control Conference (ACC), 2025 paper / arXiv A filtering-based warm-started sequential convex programming framework for nonconvex multi-agent quadrotor trajectory optimization, achieving significantly faster convergence and improved solution quality. |
|
Website template from Jon Barron. |